Hey everyone!
have not found a place where the fixed-wing control for the PX4 is being done so I started this blog.

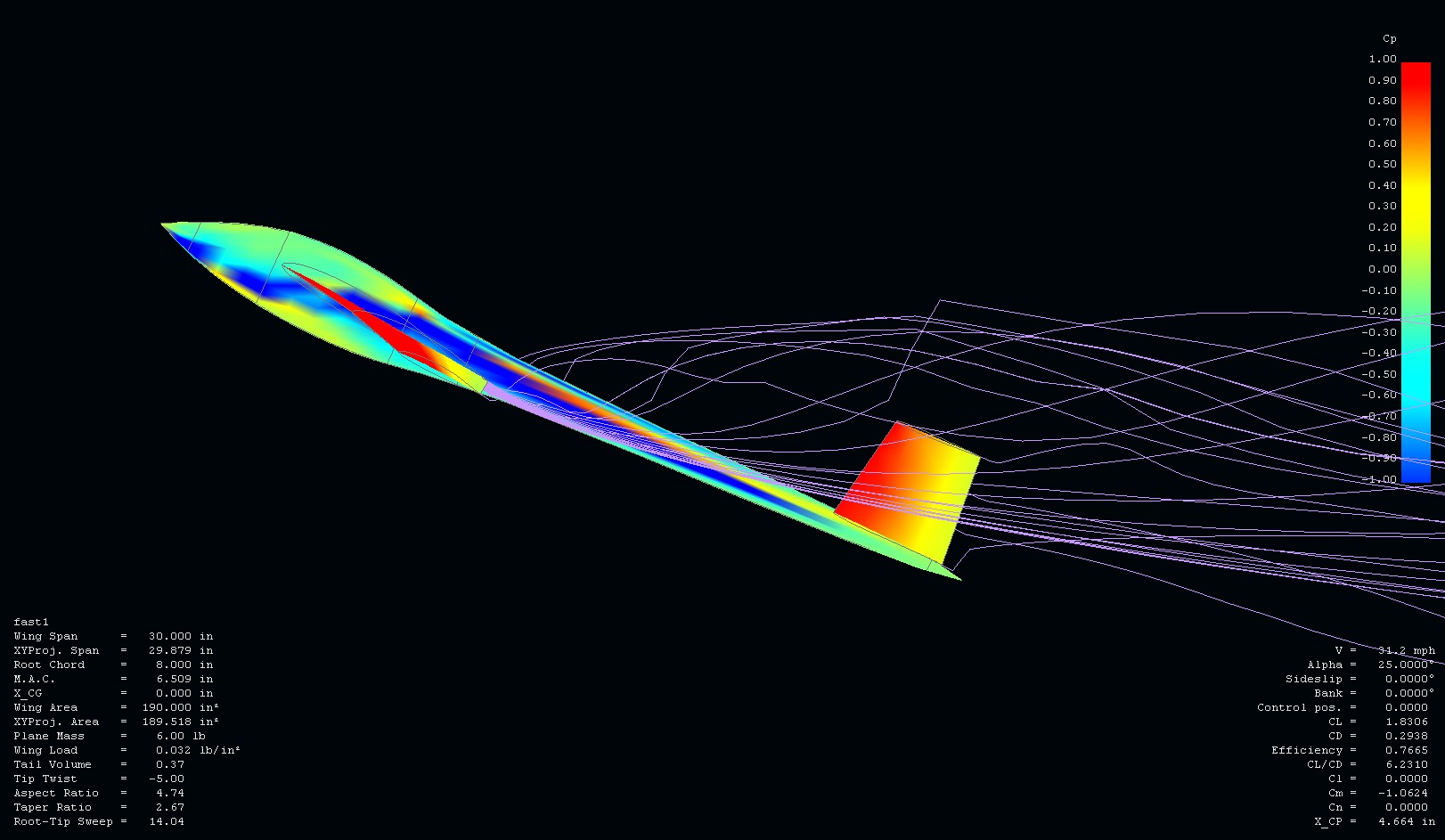
This is a Screen shot from XFLR5. I use it to mathematically model the physical form of an airplane. I can then take this description of said plane and then start modeling the flow of air over the surfaces described is the model. You can then send modeled air at it in different angles and at different viscosity. In other words different pitches and yaws as well as different air densities or altitudes.
I use it all the time to make U.A.Vs. I think it should be integrated into the PX4 so that we can start introducing into the mathematical models of the control algorithms, a model of the crafts interaction with its environment (air). Thus achieving a much more complete mathematical description of the system.
This can be implemented by modeling the aicraft in XFLR5 then taking the results and generating LUTs of the predicted air/air-frame interactions. just one example of this would be to use the generated full airplane polar graphs to predict what AOA at a given speed and air density, should produce level flight or even produce a desired vertical acceleration (climb or dive). This would greatly reduce the dependence on the PID loop to achieve a given altitude, making the system much more stable at a greater range of the aircrafts flight envelope.
This can also be applied to different control loops as well. yaw and roll control. It can also be applied to every control surface as well. XFLR5 can generate tables of inertial moment data as well giving you a Cm polar. this can be calculated for various control surface angles. You can then take the aerodynamic Cm data and combine it with a physical inertial model to do a full stability analysis. The output of the Cm and the inertial model data can then be feed in to the control loops to achieve desired rotational accelerations instead of purely relying on the PID loop. Giving the control loops a much wider dynamic range that is possible with just a PID loop.


Hi,
I plan to buy the PX4 to use it for the techpod in the future. Is it possible to get some data from you in order to construct a model of the Techpod for control design?
Greetings,
Techpod_fan
Sure, send me an email and we can share some info.
Wow. Magical stuff! Have you made any progress getting model based calcs into the px4?